
Page 68 - 4617
P. 68
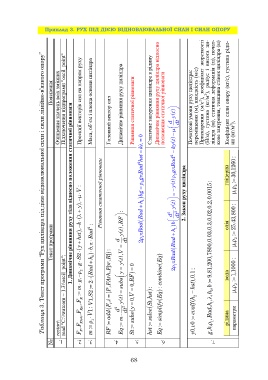
Приклад 3. РУХ ПІД ДІЄЮ ВІДНОВЛЮВАЛЬНОЇ СИЛИ І СИЛИ ОПОРУ
жорсткості ци- висота і
Таблиця 3. Текст програми “Рух циліндра під дією відновлювальної сили і сили лінійно-в’язкого опору”
Очищення значень всіх змінних Проекції векторів сил на напрям руху Маса, об’єм і площа основи циліндра Головний вектор сил Динамічне рівняння руху циліндра Рівняння статичної рівноваги положення статичної рівноваги d t y dt Початкові умови руху циліндра: переміщення (м), швидкість (м/с) (м/с 2 ), 3 ), (кг/м густина
Пояснення Підключення підпрограми "оscil_point" Статичне занурення циліндра в рідину Динамічне рівняння руху циліндра відносно коефіцієнт радіус ліндра (м), статична деформація (м), почат- кове занурення, товщина стінок циліндра (м) Коефіцієнт сили опору (кг/с), густина ріди-
1. Динамічне рівняння руху тіла відносно положення статичної рівноваги
k 0 t ky Прискорення (Н/м), ни (кг/м 3 ),
2 hst 2 Rad 30,1260:
: Rad 2 g t y 2 g гліцерин : 2
V Рівняння статичної рівноваги bg 2. Закон руху циліндра ,
, h 1
y t y
: 2 2
Rad d dt 25.43,800:
k , 2 : ,RF Rad h 1 9.81,200,7800,0.03,0.3,0.02,0.2,0.0015: олія
Текст програми hst y Rad , b ]: d yt dt 2 1 Rad b : , 2
read "C:\\watcom – 1.3\\oscil_point";
2 S h 1 ,R ,V yt Eq Rad :
g 0 1
,Fpr 2 1,1000
2 Rad
, y combine ),0.1: вода
g 2 ,FArh 0,RF : 2
m 2 : : : hst : 2 ,b ,
: [P ,hst ,h
R 1,S 0,V Eq (h 2
,F ,i i yt St
Fpr 1: V F 2 2 y evalf ,h 1 ,
,F FArh V add d subs dt subs solve simplify 1 ,Rad рідина параметри
restart: ,F F P . m : 1 : RF Eq m : St : hst : Eq 0: 0,v y ,k g ,
№ 1. 2. 3. 4. : 5. 6. 7.
68