
Page 51 - 4617
P. 51
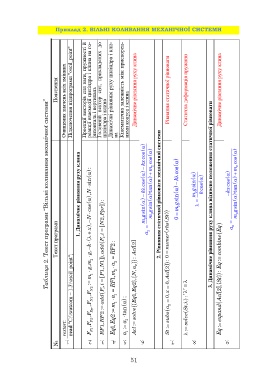
Приклад 2. ВІЛЬНІ КОЛИВАННЯ МЕХАНІЧНОЇ СИСТЕМИ
до прикладених
Очищення значень всіх змінних ризонталь і вертикаль вектор циліндра і клина нями конуса і клина
Пояснення Підключення підпрограми "oscil_point" Проекції векторів сил ваги, пружності й реакції взаємодії циліндра і клина на го- сил, Динамічні рівняння руху циліндра і кли- Кінематична залежність між прискорен- Динамічне рівняння руху клина Рівняння статичної рівноваги Статична деформація пружини Динамічне рівняння руху клина
Таблиця 2. Текст програми “Вільні коливання механічної системи”
Головний
на
1. Динамічне рівняння руху клина
cos
kx cos cos
: m 2 cos m 2
k
sin cos sin cos
k tan cos kx tan
,N 2. Рівняння статичної рівноваги механічної системи mg 1 k 3. Динамічне рівняння руху клина відносно положення статичної рівноваги
: sin
cos sin sin mg 1 sin
2,Fpr mg 1 mg 1
N , N m 1 g St 0 2
Текст програми x k ,i F i 2: 2 a 2 rhs numer Eq combine a
read "C:\\watcom – 1.3\\oscil_point";
2 , g ,add 1 RF 2 Acl : 0 : :
gm , 1,N a 2 Eq
1 2 ,a 2 :
m P 1,m N 0,Acl
: ,i RF , 2 St
2 i
N F 1,Eq '' 2,
1 ,F a 1 : 0,x :
N add Eq Acl
,F m 1 2 ,
Fpr : tan a St
2 ,F P 2 1,RF 2: 2 solve subs solve expand
restart: F 1 ,F P RF 1,Eq Eq a a : 1 : Acl : St : : Eq
№ 1. 2. 3. 4. 5. 6. 7. 8. 9.
51