
Page 46 - 4617
P. 46
Приклад 2. ВІЛЬНІ КОЛИВАННЯ МЕХАНІЧНОЇ СИСТЕМИ
Приклад 2. Вільні коливання механічної системи
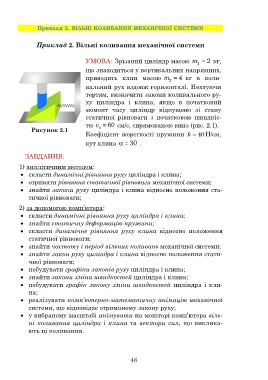
УМОВА: Зрізаний циліндр масою m 2 кг,
1
що знаходиться у вертикальних напрямних,
приводить клин масою m 4 кг в коли-
2
вальний рух вздовж горизонталі. Нехтуючи
тертям, визначити закони коливального ру-
ху циліндра і клина, якщо в початковий
момент часу циліндр відпущено зі стану
статичної рівноваги з початковою швидкіс-
тю v
Рисунок 2.1 0 60 см/с, спрямованою вниз (рис. 2.1).
Коефіцієнт жорсткості пружини k 40Н/см,
кут клина 30 .
ЗАВДАННЯ:
1) аналітичним методом:
скласти динамічні рівняння руху циліндра і клина;
отримати рівняння статичної рівноваги механічної системи;
знайти закони руху циліндра і клина відносно положення ста-
тичної рівноваги;
2) за допомогою комп’ютера:
скласти динамічні рівняння руху циліндра і клина;
знайти статичну деформацію пружини;
скласти динамічне рівняння руху клина відносно положення
статичної рівноваги;
знайти частоту і період вільних коливань механічної системи;
знайти закон руху циліндра і клина відносно положення стати-
чної рівноваги; 51
побудувати графіки законів руху циліндра і клина;
знайти закони зміни швидкостей циліндра і клина;
побудувати графік закону зміни швидкостей циліндра і кли-
на;
реалізувати комп’ютерно-математичну анімацію механічної
системи, що відповідає отриманому закону руху;
у вибраному масштабі анімувати на моніторі комп’ютера віль-
ні коливання циліндра і клина та вектори сил, що виклика-
ють ці коливання.
46