
Page 49 - 4617
P. 49
Приклад 2. ВІЛЬНІ КОЛИВАННЯ МЕХАНІЧНОЇ СИСТЕМИ
x
де – деформація пружини у поточному положенні.
ст
Пов’яжемо між собою прискорення циліндра і клина. Оскільки
точки контакту обох тіл, через які передається рух, здійснюють
складний рух, то за теоремою Коріоліса
a 1 a r a e a cor ,
де a – прискорення відносного руху точки циліндра по поверхні
r
клина, a a – прискорення переносного руху цієї ж точки цилін-
e
2
дра разом з клином, a cor 0, так як переносний рух поступальний
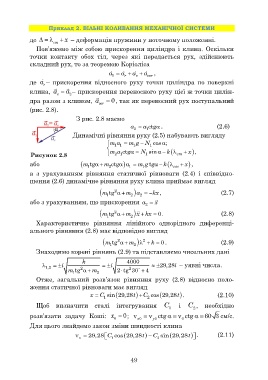
(рис. 2.8).
З рис. 2.8 маємо
a a 1 ctg . (2.6)
2
Динамічні рівняння руху (2.5) набувають вигляду
ma m g N cos ;
1
11
1
ma ctg N sin k x
Рисунок 2.8 21 1 ст ,
або m 1 tg m 2 ctg a mg tg k ст x ,
1
1
а з урахуванням рівняння статичної рівноваги (2.4) і співвідно-
шення (2.6) динамічне рівняння руху клина приймає вигляд
m 1 tg m 2 a kx , (2.7)
2
2
x
або з урахуванням, що прискорення a
2
m 1 tg m 2 x kx 0. (2.8)
2
Характеристичне рівняння лінійного однорідного диференці-
ального рівняння (2.8) має відповідно вигляд
m 1 tg m 2 k 0. (2.9)
2
2
Знаходимо корені рівнянь (2.9) та підставляємо чисельних дані
k 4000
1,2 i 2 i 2 29,28i – уявні числа.
m
1 tg m 2 2 tg 30 4
Отже, загальний розв’язок рівняння руху (2.8) відносно поло-
ження статичної рівноваги має вигляд
x C 1 sin 29,28t C 2 cos 29,28t . (2.10)
Щоб визначити сталі інтегрування C і C , необхідно
2
1
розв’язати задачу Коші: x 0; v x 0 v ctg v ctg 60 3 см/с.
y
0
0
0
Для цього знайдемо закон зміни швидкості клина
v 29,28 C 1 cos 29,28t C 2 sin 29,28t . (2.11)
x
49