
Page 177 - 4617
P. 177
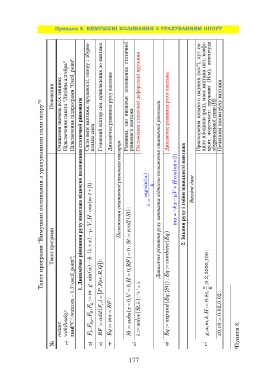
Приклад 8. ВИМУШЕНІ КОЛИВАННЯ З УРАХУВАННЯМ ОПОРУ
статичної на- кут (м/с 2 ), амплітуда
Очищення значень всіх змінних Підключення пакета "Лінійна алгебра" Динамічне рівняння руху вантажа визначає що рівноваги вантажа Динамічне рівняння руху вантажа вільного жорсткості збурювальної сили (Н) Початкові умови руху вантажа
Пояснення Підключення підпрограми "Oscil_point" Сили ваги вантажа, пружності, опору і збурю- Головний вектор сил, прикладених до вантажа положення Положення статичної деформації пружини падіння хилу площини (рад), маса вантажа (кг), коефі- (Н/м), пружини
1. Динамічне рівняння руху вантажа відносно положення статичної рівноваги
Текст програми “Вимушені коливання з урахуванням сили опору” 6
вальна сила
Рівняння,
Прискорення цієнт
t
cos
:
sin k H
Положення статичної рівноваги тягарця Динамічне рівняння руху вантажа відносно положення статичної рівноваги Вихідні дані
t mg V 2. Закони руху і зміни швидкості вантажа
cos : kx
St
VH , evalf ma
Текст програми , x k : St 0 : combine Eq :
read"C:\\watcom – 1.3\\oscil_point";
, : ,,Q R 0,RF : ,0.2,2000,100
sin Eq :
,Fpr 0,H
g }
m P '' ,{St 9.81, 6 :
: : 0,V : Eq
Q ,i i RF , 0.02,0.02
,F ,F R add F x St expand ,H :
restart: with(linalg): ,F F Fpr P : RF . Eq ma : subs : St solve : : Eq ,mk , g : 0 xv 0, 6 Пункти 8,
№ 1. 2. 3. 4 5. 6. 7. ,
177