
Page 150 - 4617
P. 150
Приклад 7. ДИНАМІЧНИЙ ДЕМПФЕР ВИМУШЕНИХ КОЛИВАНЬ
Приклад 7. Динамічний демпфер вимушених коливань
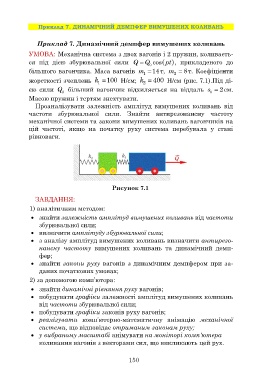
УМОВА: Механічна система з двох вагонів і 2 пружин, коливаєть-
ся під дією збурювальної сили Q Q 0 cos pt , прикладеного до
більшого вагончика. Маса вагонів m 1 14 т, m 2 8т. Коефіцієнти
жорсткості зчеплень k 1 100 Н/см; k 2 400 Н/см (рис. 7.1).Під ді-
єю сили Q більший вагончик відхиляється на віддаль s 2см.
0 0
Масою пружин і тертям знехтувати.
Проаналізувати залежність амплітуд вимушених коливань від
частоти збурювальної сили. Знайти антирезонансну частоту
механічної системи та закони вимушених коливань вагончиків на
цій частоті, якщо на початку руху система перебувала у стані
рівноваги.
Рисунок 7.1
ЗАВДАННЯ:
1) аналітичним методом:
знайти залежність амплітуд вимушених коливань від частоти
збурювальної сили;
визначити амплітуду збурювальної сили;
з аналізу амплітуд вимушених коливань визначити антирезо-
нансну частоту вимушених коливань та динамічний демп-
фер;
знайти закони руху вагонів з динамічним демпфером при за-
даних початкових умовах;
2) за допомогою комп’ютера:
знайти динамічні рівняння руху вагонів;
побудувати графіки залежності амплітуд вимушених коливань
від частоти збурювальної сили;
побудувати графіки законів руху вагонів;
реалізувати комп’ютерно-математичну анімацію механічної
системи, що відповідає отриманим законам руху;
у вибраному масштабі анімувати на моніторі комп’ютера
коливання вагонів з векторами сил, що викликають цей рух.
150