
Page 21 - 4399
P. 21
2 КІНЕМАТИКА
2.1 Криволінійний рух. Прискорення при криволінійному
русі. Нормальне і тангенціальне прискорення
Про нормальне прискорення можемо говорити лише
стосовно криволінійного руху. Найпростішим випадком
криволінійного руху є рух по колу.
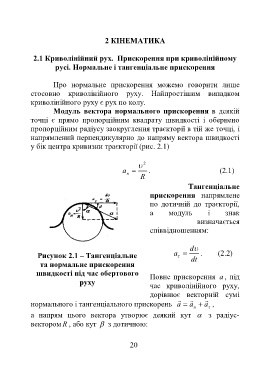
Модуль вектора нормального прискорення в деякій
точці є прямо пропорційним квадрату швидкості і обернено
пропорційним радіусу заокруглення траєкторії в тій же точці, і
напрямлений перпендикулярно до напряму вектора швидкості
у бік центра кривизни траєкторії (рис. 2.1)
2
a . (2.1)
n
R
Тангенціальне
прискорення напрямлене
по дотичній до траєкторії,
а модуль і знак
визначається
співвідношенням:
d
Рисунок 2.1 – Тангенціальне a . (2.2)
dt
та нормальне прискорення
швидкості під час обертового
Повне прискорення a , під
руху
час криволінійного руху,
дорівнює векторній сумі
нормального і тангенціального прискорень a a a ,
n
а напрям цього вектора утворює деякий кут з радіус-
вектором R , або кут з дотичною:
20