
Page 54 - 39
P. 54
відстань між точкою Р Х і класом Х 0 Х з центром М
визначається величиною d 1 , як найменша величина
d 1(P,X 0)=infd{(P,M),M X 0}.
Відстань між двома класами Х 1 Х Х 2 Х визначається
таким же чином, як найменше значення, або нижня границя
d 2(X 1,X 2)=inf{d(P,M)|P X 1,M X 2} .
Якщо ознаки вибрані вдало, то об’єкти чи ствoрені за
ними образи будуть тим більше подібні між собою, чим
менша відстань d.
Експериментальні дослідження виконувались на
ділянці території, представленої ЦМР з висотами в
перехрестях регулярної сітки. Для виділення різних форм
рельєфу, а саме: хребтів, пагорбів, улоговин, ям та
схилів, орієнтованих в певному напрямку
використовувались різні функції розв’язку (4.8 - 4.11)
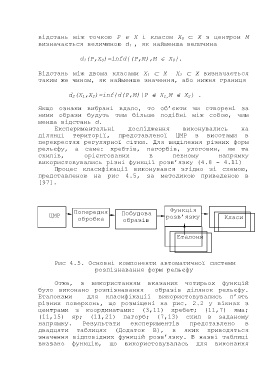
Процес класифікації виконувався згідно зі схемою,
представленою на рис 4.5, за методикою приведеною в
[97].
Функція
Попередня Побудова
ЦМР розв’язку Класи
обробка образів
Еталони
Рис 4.5. Основні компоненти автоматичної системи
розпізнавання форм рельєфу
Отже, з використанням вказаних чотирьох функцій
було виконано розпізнавання образів ділянок рельєфу.
Еталонами для класифікації використовувались п’ять
різних поверхонь, що розміщені на рис. 2.2 у вікнах з
центрами з координатами: (3,11) хребет; (11,7) яма;
(11,15) яр; (11,21) пагорб; (7,13) схил в заданому
напрямку. Результати експериментів представлено в
двадцяти таблицях (Додаток В), в яких приводяться
значення відповідних функцій розв’язку. В назві таблиці
вказано функцію, що використовувалась для виконання