
Page 7 - 375_
P. 7
K oc
G (s ) ,
T oc s 1
де для даної системи
T oc 6 с, K oc 1.
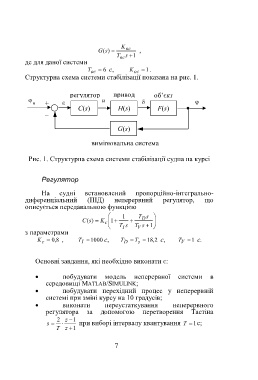
Структурна схема системи стабілізації показана на рис. 1.
регулятор привод об’єкт
u
0 +
C(s) H(s) F(s)
–
G(s)
вимірювальна система
Рис. 1. Структурна схема системи стабілізації судна на курсі
Регулятор
На судні встановлений пропорційно-інтегрально-
диференціальний (ПІД) неперервний регулятор, що
описується передавальною функцією
1 T s
C (s ) K c 1 D
T I s T V s 1
з параметрами
K c 8 , 0 , T I 1000 с, T D T s 18 2 , с, T V 1 с.
Основні завдання, які необхідно виконати є:
побудувати модель неперервної системи в
середовищі MATLAB/SIMULINK;
побудувати перехідний процес у неперервній
системі при зміні курсу на 10 градусів;
виконати переустаткування неперервного
регулятора за допомогою перетворення Тастіна
2 z 1
s при виборі інтервалу квантування T 1с;
T z 1
7