
Page 12 - 375_
P. 12
3. Виділіть всі елементи замкнутого контуру і скопіюйте
їх (перетягнувши при натиснутій клавіші Ctrl) на
вільне місце нижче першої схеми.
4. У скопійованій схемі видаліть блок, що відповідає
неперервному регулятору, і установите на його місце
блок типу Discrete Transfer Fcn із групи Discrete.
Зробіть подвійного клік мишею по цьому блоці і
введіть nCd поле Numerator, dCd поле Denominator і
T поле Sample time.
5. Для того, щоб об'єднати два сигнали в один векторний
сигнал, використовують блок-мультиплексор.
Перетягніть два таких блоки (блоки Mux із групи
Signal routing чи, в інших версіях, із групи
Connections) у свою модель. На вхід одного
мультиплексора подайте сигнали виходу неперервної і
цифрової систем (кути рискання), а на входи другого –
сигнали керування (кути повороту руля). Виходи
мультиплексорів з'єднаєте з входами підсилювачів
перед блоками-осцилографами. Тепер у вікні
осцилографів будуть виведені два графіки.
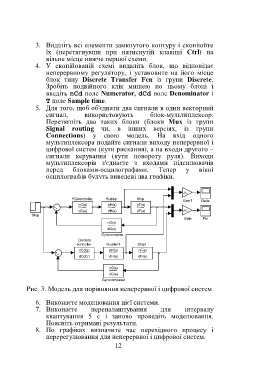
Рис. 3. Модель для порівняння неперервної і цифрової систем
6. Виконаєте моделювання цієї системи.
7. Виконаєте переналаштування для інтервалу
квантування 5 с і заново проведіть моделювання.
Поясніть отримані результати.
8. По графіках визначите час перехідного процесу і
перерегулювання для неперервної і цифрової систем.
12