
Page 63 - Семенцов Г
P. 63
Будемо розрізняти два випадки:
1) вихід нечіткого регулятора рівний входу процесу (tu ) ,
2) вихід нечіткого регулятора рівний похідній входу
du
процесу, тобто .
dt
В першому випадку будь-яка послідовність в, кожному
нечіткому правилі керування відноситься з процесом входу, тоді
як в іншому разі це відноситься з похідною процесу входу (або
зміна процесу входу в дискретному часі). Як показано на рис.
6.1 тип нечіткого регулятора залежить від стану вмикачів p 0 , p 1 ,
p 2 , A і B. Це означає, що вмикачі визначають деяку
Булеву функцію S=S(p 0 , p 1 , p 2 , A і B), що має бути
ідентифікована з особливим типом нечіткого регулятора (див.
табл. 6.1). Очевидно не всі позиції вмикачів є дозволеними. В
деяких випадках, як в табл. 6.1, один може визначати різні типи
регуляторів: П-НР, І-НР, Д-НР, ПІ-НР, ПД-НР, ІД-НР і на кінець
ПІД-НР. Однак, ми розглянемо тільки три типи регуляторів: ПІ-
НР, ПД-НР і ПІД-НР, тому звернім увагу, що ІД-НР має
переважно обмежене застосування, тоді як П-НР, І-НР або Д-НР
не є важкими для досліджень.
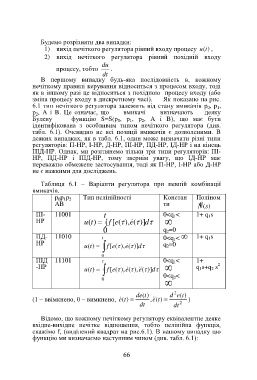
Таблиця 6.1 – Варіанти регулятора при певній комбінації
вмикачів.
p 0 p 1 p 2 Тип нелінійності Констан Поліном
AB ти N (s )
€
ПІ- 11001 t 0<q 1 < 1+ q 1 s
НР u( t) f [ e ),( e )]( d
0 q 2 =0
ПД- 11010 t 0<q 1 < 1+ q 1 s
НР u( t) f [ e ),( e )]( d q 2 =0
0
ПІД 11101 t 0<q 1 < 1+
-НР u( t) f [ e ),( e ),( e )]( d q 1 s+q 2 s 2
0<q 2 <
0
de (t ) d 2 e (t )
(1 – ввімкнено, 0 – вимкнено, (te ) ,e (t ) )
dt dt 2
Відомо, що кожному нечіткому регулятору еквівалентне деяке
вхідне-вихідне нечітке відношення, тобто нелінійна функція,
скажімо f, (виділений квадрат на рис.6.1). В нашому випадку цю
функцію ми визначаємо наступним чином (див. табл. 6.1):
66