
Page 62 - Семенцов Г
P. 62
РОЗДІЛ 6
АНАЛІЗ СТІЙКОСТІ НЕЧІТКИХ СИСТЕМ КЕРУВАННЯ З
НЕЧІТКИМ ПІД-РЕГУЛЯТОРОМ
6.1. ТВЕРДЖЕННЯ ПРОБЛЕМИ
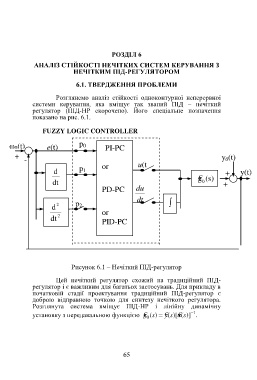
Розглянемо аналіз стійкості одноконтурної неперервної
системи керування, яка вміщує так званий ПІД – нечіткий
регулятор (ПІД-НР скорочено). Його спеціальне позначення
показано на рис. 6.1.
FUZZY LOGIC CONTROLLER
0(t) e(t) p 0 PI-PC
+ - y 0(t)
d p 1 or u(t
) g € ) s ( + y(t)
dt 0 +
PD-PC du
2 p 2 dt
d
2 or
dt PID-PC
Рисунок 6.1 – Нечіткий ПІД-регулятор
Цей нечіткий регулятор схожий на традиційний ПІД-
регулятор і є важливим для багатьох застосувань. Для прикладу в
початковій стадії проектування традиційний ПІД-регулятор є
доброю відправною точкою для синтезу нечіткого регулятора.
Розглянута система вміщує ПІД-НР і лінійну динамічну
установку з передавальною функцією € g 0 (s ) y ( € s )[u ( € s )] 1 .
65