
Page 30 - Семенцов Г
P. 30
початковий нечіткий алгоритм складається із правил
виду
" якщо у=у j ; то u=u j ; інакше ... ", (3.5) де u і у – вхідна і
вихідна координата об’єкта, які вважаються лінгвістичними
змінними; u j і у j – відповідно значення цих координат.
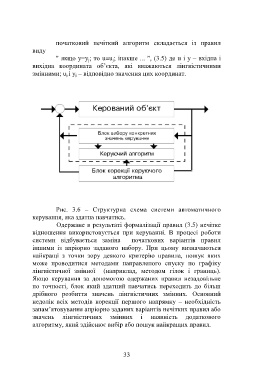
Рис. 3.6 – Структурна схема системи автоматичного
керування, яка здатна навчатись.
Одержане в результаті формалізації правил (3.5) нечітке
відношення використовується при керуванні. В процесі роботи
системи відбувається заміна початкових варіантів правил
іншими із апріорно заданого набору. При цьому визначаються
найкращі з точки зору деякого критерію правила, пошук яких
може проводитися методами направленого спуску по графіку
лінгвістичної змінної (наприклад, методом гілок і границь).
Якщо керування за допомогою одержаних правил незадовільне
по точності, блок який здатний навчатись переходить до більш
дрібного розбиття значень лінгвістичних змінних. Основний
недолік всіх методів корекції першого напрямку – необхідність
запам’ятовування апріорно заданих варіантів нечітких правил або
значень лінгвістичних змінних і наявність додаткового
алгоритму, який здійснює вибір або пошук найкращих правил.
33