
Page 104 - 6218
P. 104
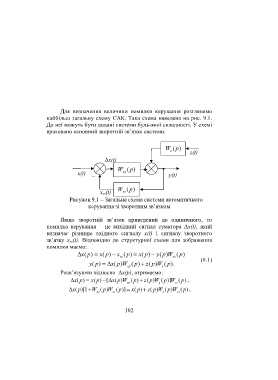
Для визначення величини помилки керування розглянемо
найбільш загальну схему САК. Така схема наведена на рис. 9.1.
До неї можуть бути додані системи будь-якої складності. У схемі
враховано основний зворотній зв’язок системи.
W ( )p
z z(t)
Δx(t)
W ( )p
x(t) xy y(t)
W ( )p
x зз(t) зз
Рисунок 9.1 – Загальна схема системи автоматичного
керування зі зворотним зв’язком
Якщо зворотній зв’язок приведений до одиничного, то
помилка керування – це вихідний сигнал суматора Δx(t), який
визначає різницю вхідного сигналу x(t) і сигналу зворотного
зв’язку x зз(t). Відповідно до структурної схеми для зображення
помилки маємо:
x ( )p x ( )p x зз ( )p x ( )p y ( )p W зз ( )p
(9.1)
y ( )p x ( )p W ( )p z ( )p W ( ).p
xy z
Розв’язуючи відносно Δx(p), отримаємо:
x ( )p x ( ) [p x ( )p W ( )p z ( )p W ( )]p W ( )p ,
xy z зз
x ( )[1p W ( )p W ( )]p x ( )p z ( )p W ( )p W ( )p ,
xy зз z зз
102