
Page 60 - 6103
P. 60
Λ(т)=0,0115+0,0085Х 1+0,001Х 2+0,001Х 4
Λ(о)= 1,512+0,013Х 1+0,892Х 2
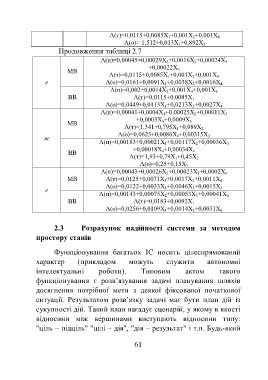
Продовження таблиці 2.7
Λ(п)=0,00045+0,00029Х 2+0,0016Х 2+0,00024Х 3
+0,00022Х 6
МВ
Λ(т)=0,0115+0,0085Х 1+0,001Х 2+0,001Х 4
е Λ(о)=0,0161+0,0091Х 1+0,0038Х 2+0,0016Х 4
Λ(п)=0,002+0,0014Х 2+0,001Х 3+0,001Х 6
ВВ Λ(т)=0,0115+0,0085Х 1
Λ(о)=0,0449+0,0113Х 1+0,0213Х 2+0,0027Х 4
Λ(п)=0,00041+0,0004Х 1+0,00025Х 2+0,00011Х 3
+0,0003Х 4+0,0009Х 6
МВ
Λ(т)=1,341+0,795Х 1+0,089Х 2
Λ(о)=0,0623+0,0086Х 1+0,00315Х 2
ж
Λ(п)=0,00183+0,00021Х 1+0,00117Х 2+0,00036Х 3
+0,00018Х 4+0,00034Х 6
ВВ
Λ(т)=1,93+0,79Х 1+0,45Х 2
Λ(о)=0,25+0,15Х 1
Λ(п)=0,00043+0,00026Х 2+0,00023Х 3+0,0002Х 6
МВ Λ(т)=0,0125+0,0071Х 1+0,0017Х 2+0,0011Х 4
Λ(о)=0,0122+0,0033Х 1+0,0046Х 3+0,0015Х 5
е
Λ(п)=0,00143+0,00075Х 2+0,00053Х 3+0,00041Х 6
ВВ Λ(т)=0,0183+0,0092Х 1
Λ(о)=0,0256+0,0109Х 1+0,0014Х 2+0,0031Х 6
2.3 Розрахунок надійності системи за методом
простору станів
Функціонування багатьох ІС носить цілеспрямований
характер (прикладом можуть служити автономні
інтелектуальні роботи). Типовим актом такого
функціонування є розв’язування задачі планування шляхів
досягнення потрібної мети з деякої фіксованої початкової
ситуації. Результатом розв’язку задачі має бути план дій із
сукупності дій. Такий план нагадує сценарій, у якому в якості
відносини між вершинами виступають відносини типу:
"ціль – підціль" "цілі – дія", "дія – результат" і т.п. Будь-який
61