
Page 11 - 4753
P. 11
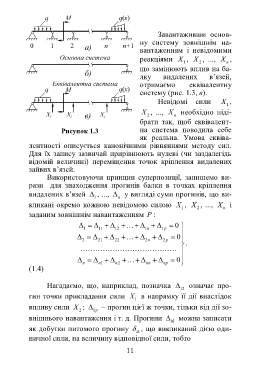
Завантаживши основ-
ну систему зовнішнім на-
вантаженням і невідомими
реакціями X , X , ..., X ,
1 2 n
що замінюють вплив на ба-
лку видалених в’язей,
отримаємо еквівалентну
систему (рис. 1.3, в).
Невідомі сили X ,
1
X , ..., X необхідно піді-
2 n
брати так, щоб еквівалент-
Рисунок 1.3 на система поводила себе
як реальна. Умова еквіва-
лентності описується канонічними рівняннями методу сил.
Для їх запису зазвичай прирівнюють нулеві (чи заздалегідь
відомій величині) переміщення точок кріплення видалених
зайвих в’язей.
Використовуючи принцип суперпозиції, запишемо ви-
рази для знаходження прогинів балки в точках кріплення
видалених в’язей , ..., у вигляді суми прогинів, що ви-
1 n
кликані окремо кожною невідомою силою X , X , ..., X і
1 2 n
заданим зовнішнім навантаженням P :
0
1 11 12 1n 1p
0
2 21 22 2n 2 p .
0
n 1 n n 2 nn np
(1.4)
Нагадаємо, що, наприклад, позначка означає про-
12
гин точки прикладання сили X в напрямку її дії внаслідок
1
впливу сили X ; – прогин цієї ж точки, тільки від дії зо-
2 1p
внішнього навантаження і т. д. Прогини можна записати
ik
як добутки питомого прогину , що викликаний дією оди-
ik
ничної сили, на величину відповідної сили, тобто
11