
Page 140 - 4679
P. 140
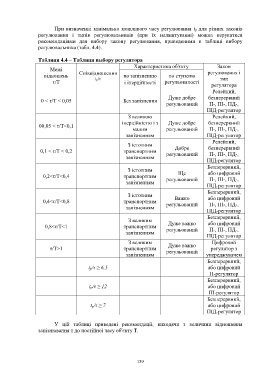
При визначенні мінімально можливого часу регулювання tр для різних законів
регулювання і типів регулювальників (при їх налаштуванні) можна керуватися
рекомендаціями для вибору закону регулювання, приведеними в таблиці вибору
регулювальника (табл. 4.4).
Таблиця 4.4 – Таблиця выбору регулятора
Характеристика об'єкту Закон
Межі
відношень Співвідношення по запізненню по ступеню регулювання і
tр/τ
тип
τ/Т і інерційності регульованості регулятора
Релейний,
Дуже добре безперервний
0 < τ/Т < 0,05 Без запізнення
регульований П-, ПІ-, ПД-,
ПІД-регулятор
З великою Релейний,
інерційністю і з Дуже добре безперервний
00,05 < τ/Т<0,1
малим регульований П-, ПІ-, ПД-,
запізненням ПІД-регулятор
Релейний,
З істотним
0,1 < τ/Т < 0,2 транспортним Добре безперервний
запізненням регульований П-, ПІ-, ПД-,
ПІД-регулятор
Безперервний,
З істотним Ще або цифровий
0,2<τ/Т<0,4 транспортним регульований П-, ПІ-, ПД-,
запізненням
ПІД-регулятор
Безперервний,
З істотним
Важко
0,4<τ/Т<0,8 транспортним регульований або цифровий
П-, ПІ-, ПД-,
запізненням
ПІД-регулятор
Безперервний,
З великим
Дуже важко
0,8<τ/Т<1 транспортним регульований або цифровий
П-, ПІ-, ПД-,
запізненням
ПІД-регулятор
З великим Цифровий
Дуже важко
τ/Т>1 транспортним регульований регулятор з
запізненням упереджувачем
Безперервний,
tр/τ ≥ 6,5 або цифровий
П-регулятор
Безперервний,
tр/τ ≥ 12 або цифровий
ПІ-регулятор
Безперервний,
tр/τ ≥ 7 або цифровий
ПІД-регулятор
У цій таблиці приведені рекомендації, виходячи з величини відношення
запізнювання т до постійної часу об'єкту Т.
139