
Page 139 - 4679
P. 139
5. Виконавчий пристрій може бути описаний також аперіодичною ланкою
першого порядку, постійна часу якого складає декілька секунд.
Визначивши чисельні значення передавальних функцій усіх ланок структурної
схеми регулювання, приступають до вибору типу регулювальника. У проектних
документах необхідно обґрунтувати і вибрати такий алгоритм регулювальника
(двопозиційний, трипозиційний, багатопозиційний релейний регулювальник,
аналоговий, цифровий ПІД, самоналагоджувальний регулятор), який при мінімальній
вартості і максимальній надійності забезпечував би задану якість регулювання
технологічного параметра (показник коливальної, точність позиціонування, підтримка
заданої температури, рівня і т. п.).
Для того, щоб обґрунтувати вибір типу алгоритму регулювальника, визначити
його налаштування, необхідно знати:
статичні і динамічні характеристики об'єкту управління, датчика і
виконавчого органу;
вимоги до якості процесу регулювання;
характер збурень, діючих на процес регулювання.
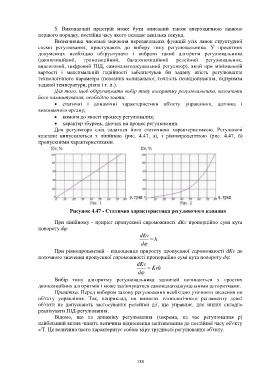
Для регулятора слід задатися його статичною характеристикою. Регулюючі
клапани випускаються з лінійною (рис. 4.47, а), і рівнопроцентною (рис. 4.47, б)
пропускними характеристиками.
Рисунок 4.47 - Статична характеристика регулюючого клапана
При лінійному - приріст пропускної спроможності dKv пропорційно сумі кута
повороту dφ:
dKv
d h
При рівнопроцентній - відношення приросту пропускної спроможності dKv до
поточного значення пропускної спроможності пропорційно сумі кута повороту dφ:
dKv
d Kvh
Вибір типу алгоритму регулювальника зазвичай починається з простих
двопозиційних алгоритмів і може закінчуватися самоналагоджувальними алгоритмами.
Примітка. Перед вибором закону регулювання необхідно уточнити зведення по
об'єкту управління. Так, наприклад, по вимогах технологічного регламенту деякі
об'єкти не допускають застосування релейної дії, що управляє, для інших складно
реалізувати ПІД-регулювання.
Відомо, що на динаміку регулювання (зокрема, на час регулювання р)
найбільший вплив чинить величина відношення запізнювання до постійної часу об'єкту
τ/Т. Ця величина часто характеризує собою міру трудності регулювання об'єкту.
138