
Page 138 - 4679
P. 138
1
1 е 0 р Q(p)
Т р 1
4 1 2
К 2
Т 2 р 1 Ê 1
5 3
1 е 1 р R(p) Q з(p)
Т 1 р 1
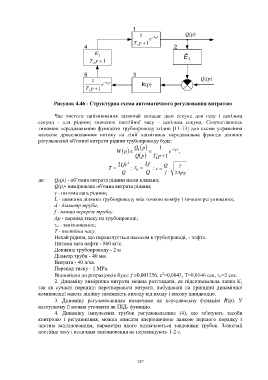
Рисунок 4.46 - Структурна схема автоматичного регулювання витратою
Час чистого запізнювання зазвичай складає долі секунд для газу і декілька
секунд - для рідини; значення постійної часу - декілька секунд. Скориставшись
типовою передавальною функцією трубопроводу згідно [11-13] для схеми управління
насосом дроселюванням потоку на лінії нагнітання передавальна функція ділянки
регульованої об'ємної витрати рідини трубопроводу буде:
Q р 1
W p k е 0 р ,
Q р Т 1 р 1
2 Lfc 2 Lf Q
T ; 0 ; с ,
Q Q f 2 pg
де: Qk(p) - об’ємна витрата рідини після клапана;
Q(p)- вимірювана об'ємна витрата рідини;
- питома вага рідини;
L - довжина ділянки трубопроводу між точкою виміру і точкою регулювання;
d - діаметр труби;
f - площа перерізу труби;
p - перепад тиску на трубопроводі;
о - запізнювання;
Т - постійна часу.
Нехай рідина, що перекачується насосом в трубопроводі, - нафта.
Питома вага нафти - 800 кг/с.
Довжина трубопроводу - 2 м
Діаметр труби - 40 мм.
Витрата - 40 л/хв.
Перепад тиску - 1 МРа.
2
Відповідно до розрахунків буде: f =0,001256, с =0,0043, Т=0,0146 сек, о=2 сек.
2. Динаміку вимірника витрати можна розглядати, як підсилювальна ланка К1
так як сучасні первинні перетворювачі витрати, побудовані на принципі динамічної
компенсації мають лінійну залежність виходу від входу і високу швидкодію.
3. Динаміку регулювальника визначимо як передавальну функцію R(р). У
наступному її можна уточнити як ПІД- функцію.
4. Динаміку імпульсних трубок регулювальника (4), що зв'язують засоби
контролю і регулювання, можна описати аперіодичною ланкою першого порядку з
чистим запізнюванням, параметри якого визначаються завдовжки трубок. Зазвичай
постійна часу і величина запізнювання не перевищують 1-2 с.
137