
Page 186 - 4655
P. 186
боті верстата-качалки це звичайно відмічається ударом пальця
кривошипа в перехідний момент.
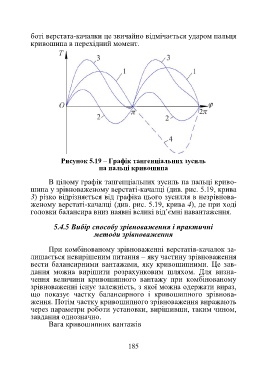
Рисунок 5.19 – Графік тангенціальних зусиль
на пальці кривошипа
В цілому графік тангенціальних зусиль на пальці криво-
шипа у зрівноваженому верстаті-качалці (див. рис. 5.19, крива
3) різко відрізняється від графіка цього зусилля в незрівнова-
женому верстаті-качалці (див. рис. 5.19, крива 4), де при ході
головки балансира вниз наявні великі від’ємні навантаження.
5.4.5 Вибір способу зрівноваження і практичні
методи зрівноваження
При комбінованому зрівноваженні верстатів-качалок за-
лишається невирішеним питання – яку частину зрівноваження
вести балансирними вантажами, яку кривошипними. Це зав-
дання можна вирішити розрахунковим шляхом. Для визна-
чення величини кривошипного вантажу при комбінованому
зрівноваженні існує залежність, з якої можна одержати вираз,
що показує частку балансирного і кривошипного зрівнова-
ження. Потім частку кривошипного зрівноваження виражають
через параметри роботи установки, вирішивши, таким чином,
завдання однозначно.
Вага кривошипних вантажів
185