
Page 40 - 4617
P. 40
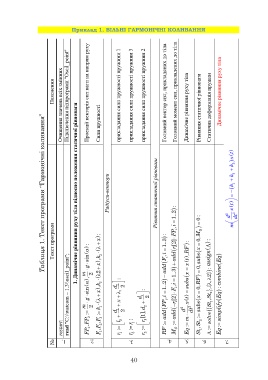
Приклад 1. ВІЛЬНІ ГАРМОНІЧНІ КОЛИВАННЯ
Очищення значень всіх змінних Сили пружності Динамічне рівняння руху тіла Рівняння статичної рівноваги Статична деформація пружин
Пояснення Підключення підпрограми "Oscil_point" Проекції векторів сил ваги на напрям руху прикладання сили пружності пружини 1 прикладання сили пружності пружини 3 прикладання сили пружності пружини 2 Головний вектор сил, прикладених до тіла Головний момент сил, прикладених до тіла Динамічне рівняння руху тіла
1. Динамічне рівняння руху тіла відносно положення статичної рівноваги
Таблиця 1. Текст програми “Гармонічні коливання”
k xt 3
Радіуси-вектори Рівняння статичної рівноваги : 1..2 2 k xt k 2 1 2
Текст програми : : x : 1..3 ,i FP [2] r i i ,RF : 0 : 0,M x O : d m dt
read "C:\\watcom – 1.3\\oscil_point";
sin g , xk 3 ,i add F i add xt 0,subs assign : Eq
, m 2 2 : 1..3 x ,2 combine
2 2 2 1..2 ,i subs 0,RF
sin , xk , d : F i , 2 :
g x d 1 2 ,i i r [2] i xt x 1 ,St Eq
m 2 k 1 2 FP 2 2 subs St
: : d 1 2 1,d add add d dt simplify
2 3 2 ,F l 3 : r 1 : 2 solve
restart: FP 1 ,FP F 1 ,F : r 1 r : r 1 3 : r 2 RF M : O Eq m St 1 ,St : : Eq
№ 1. 2. 3. : 4. 5. : 6. 7.
40