
Page 51 - 4143
P. 51
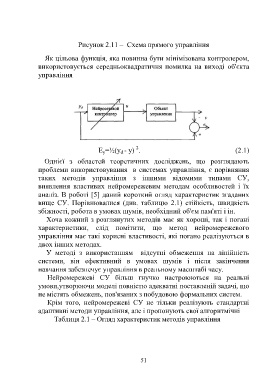
Рисунок 2.11 – Схема прямого управління
Як цільова функція, яка повинна бути мінімізована контролером,
використовується середньоквадратичня помилка на виході об'єкта
управління
2
Е =½(y - y) . (2.1)
d
y
Однієї з областей теоретичних досліджень, що розглядають
проблеми використовування в системах управління, є порівняння
таких методів управління з іншими відомими типами СУ,
виявлення властивих нейромережевим методам особливостей і їх
аналіз. В роботі [5] даний короткий огляд характеристик згаданих
вище СУ. Порівнювалися (див. таблицю 2.1) стійкість, швидкість
збіжності, робота в умовах шумів, необхідний об'єм пам'яті і ін.
Хоча кожний з розглянутих методів має як хороші, так і погані
характеристики, слід помітити, що метод нейромережевого
управління має такі корисні властивості, які погано реалізуються в
двох інших методах.
У методі з використанням відсутні обмеження на лінійність
системи, він ефективний в умовах шумів і після закінчення
навчання забезпечує управління в реальному масштабі часу.
Нейромережеві СУ більш гнучко настроюються на реальні
умови,утворюючи моделі повністю адекватні поставленій задачі, що
не містять обмежень, пов'язаних з побудовою формальних систем.
Крім того, нейромережеві СУ не тільки реалізують стандартні
адаптивні методи управління, але і пропонують свої алгоритмічні
Таблиця 2.1 – Огляд характеристик методів управління
51