
Page 50 - 4143
P. 50
У даний час достатньо добре розроблений і широко
використовується цілий ряд іншої можливої архітектури побудови
нейромережевих СУ. У всіх з них, призначенням нейромережевого
контролера є вироблення адекватного керівного сигналу для
управління динамікою станів об'єкту управління від початкового
стану до бажаного підсумкового стану. Причому зміна станів
повинна відбуватися по оптимальній траєкторії. Організація
контролю за станами об'єкту управління і реалізація
нейромережевого контролера в значній мірі залежать від вибраного
алгоритму навчання і структури управління, що використовується.
Такими, що найбільш широко використовуються, є схема прямого
(безпосереднього) управління і схема непрямого управління. При
цьому частіше за все як алгоритм навчання використовується
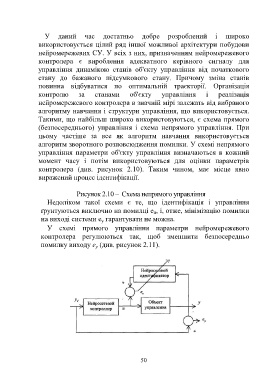
алгоритм зворотного розповсюдження помилки. У схемі непрямого
управління параметри об'єкту управління визначаються в кожний
момент часу і потім використовуються для оцінки параметрів
контролера (див. рисунок 2.10). Таким чином, має місце явно
виражений процес ідентифікації.
Рисунок 2.10 – Схема непрямого управління
Недоліком такої схеми є те, що ідентифікація і управління
ґрунтуються виключно на помилці е , і, отже, мінімізацію помилки
и
на виході системи е гарантувати не можна.
y
У схемі прямого управління параметри нейромережевого
контролера регулюються так, щоб зменшити безпосередньо
помилку виходу е (див. рисунок 2.11).
у
50