
Page 6 - 6916
P. 6
ЛАБОРАТОРНА РОБОТА № 1
Дослідження роботи ручного маніпулятора і сервомотора
1.1. Мета роботи
Вивчити принцип роботи та одержати навики роботи з
ручним маніпулятором та сервомотором.
1.2. Теоретичні відомості
В даній роботі необхідно озайомитись з принципами роботи
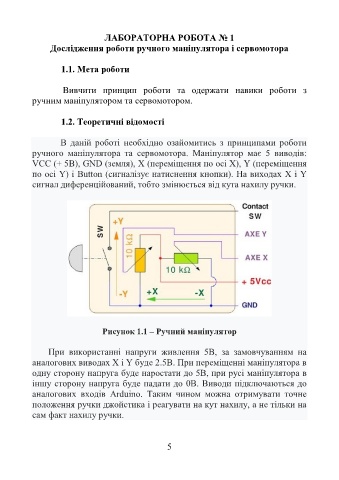
ручного маніпулятора та сервомотора. Маніпулятор має 5 виводів:
VCC (+ 5В), GND (земля), Х (переміщення по осі Х), Y (переміщення
по осі Y) і Button (сигналізує натиснення кнопки). На виходах Х і Y
сигнал диференційований, тобто змінюється від кута нахилу ручки.
Рисунок 1.1 – Ручний маніпулятор
При використанні напруги живлення 5В, за замовчуванням на
аналогових виводах X і Y буде 2.5В. При переміщенні маніпулятора в
одну сторону напруга буде наростати до 5В, при русі маніпулятора в
іншу сторону напруга буде падати до 0В. Виводи підключаються до
аналогових входів Arduino. Таким чином можна отримувати точне
положення ручки джойстика і реагувати на кут нахилу, а не тільки на
сам факт нахилу ручки.
5