
Page 39 - 6486
P. 39
використовується контакт COMMON який приєднують до
контакту із максимальною допустимою напругою. Здебільшого в
системі ця напруга є напругою живлення.
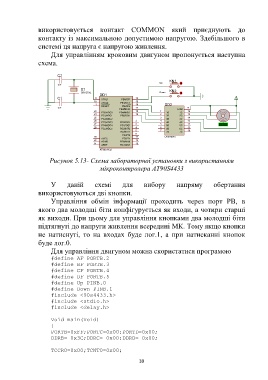
Для управлінням кроковим двигуном пропонується наступна
схема.
C2
KN1
Up
1nF
X1 KN2
CRYSTAL Down
DD1
C1 9 XTAL1 PB0/ICP 14
10 XTAL2 PB1/OC1 15
1 16 DD2
RESET PB2/SS
1nF PB3/MOSI 17 COM 9
23 PC0/ADC0 PB4/MISO 18 1 1B 1C 16
24 19 2 15
PC1/ADC1 PB5/SCK 2B 2C
25 3 14
PC2/ADC2 3B 3C
26 2 4 13
PC3/ADC3 PD0/RXD 4B 4C
27 3 5 12 +88.8
PC4/ADC4 PD1/TXD 5B 5C
28 4 6 11
PC5/ADC5 PD2/INT0 6B 6C
PD3/INT1 5 7 7B 7C 10
6
PD4/T0
20 11 ULN2002A
AVCC PD5/T1
22 12
AGND PD6/AIN0
21 13
AREF PD7/AIN1
AT90S4433
Рисунок 5.13- Схема лабораторної установки з використанням
мікроконтролера АТ90S4433
У даній схемі для вибору напряму обертання
використовуються дві кнопки.
Управління обмін інформації проходить через порт PB, в
якого два молодші біти конфігурується як входи, а чотири старші
як виходи. При цьому для управління кнопками два молодші біти
підтягнуті до напруги живлення всередині МК. Тому якщо кнопки
не натиснуті, то на входах буде лог.1, а при натисканні кнопок
буде лог.0.
Для управління двигуном можна скористатися програмою
#define AF PORTB.2
#define BF PORTB.3
#define CF PORTB.4
#define DF PORTB.5
#define Up PINB.0
#define Down PINB.1
#include <90s4433.h>
#include <stdio.h>
#include <delay.h>
void main(void)
{
PORTB=0xFF;PORTC=0x00;PORTD=0x00;
DDRB= 0x3C;DDRC= 0x00;DDRD= 0x00;
TCCR0=0x00;TCNT0=0x00;
39