
Page 58 - 6368
P. 58
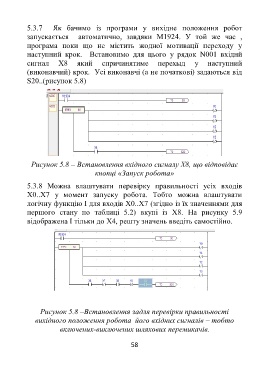
5.3.7 Як бачимо із програми у вихідне положення робот
запускається автоматично, завдяки М1924. У той же час ,
програма поки що не містить жодної мотивації переходу у
наступний крок. Встановимо для цього у рядок N001 вхіднй
сигнал Х8 який спричинятиме перехыд у наступний
(виконавчий) крок. Усі виконавчі (а не початкові) задаються від
S20..(рисунок 5.8)
Рисунок 5.8 – Встановлення вхідного сигналу Х8, що відповідає
кнопці «Запуск робота»
5.3.8 Можна влаштувати перевірку правильності усіх входів
Х0..Х7 у момент запуску робота. Тобто можна влаштувати
логічну функцію І для входів Х0..Х7 (згідно із їх значеннями для
першого стану по таблиці 5.2) вкупі із Х8. На рисунку 5.9
відображена І тільки до Х4, решту значень введіть самостійно.
Рисунок 5.8 –Встановлення задля перевірки правильності
вихідного положення робота його вхідних сигналів – тобто
включених-виключених шляхових перемикачів.
58