
Page 52 - 6368
P. 52
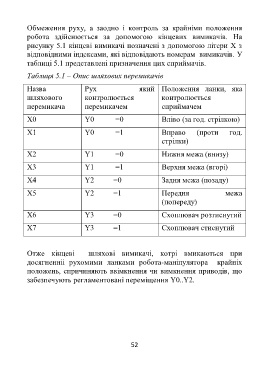
Обмеження руху, а заодно і контроль за крайніми положення
робота здійснюється за допомогою кінцевих вимикачів. На
рисунку 5.1 кінцеві вимикачі позначені з допомогою літери Х з
відповідними індексами, які відповідають номерам вимикачів. У
таблиці 5.1 представлені призначення цих сприймачів.
Таблиця 5.1 – Опис шляхових перемикачів
Назва Рух який Положення ланки, яка
шляхового контролюється контролюється
перемикача перемикачем сприймачем
X0 Y0 =0 Вліво (за год. стрілкою)
X1 Y0 =1 Вправо (проти год.
стрілки)
X2 Y1 =0 Нижня межа (внизу)
X3 Y1 =1 Верхня межа (вгорі)
X4 Y2 =0 Задня межа (позаду)
X5 Y2 =1 Передня межа
(попереду)
X6 Y3 =0 Схоплювач розтиснутий
Х7 Y3 =1 Схоплювач стиснутий
Отже кінцеві шляхові вимикачі, котрі вмикаються при
досягненніі рухомими ланками робота-маніпулятора крайніх
положень, спричиняють ввімкнення чи вимкнення приводів, що
забезпечують регламентовані переміщення Y0..Y2.
52