
Page 10 - 4979
P. 10
1.3 Структурний аналіз механізму
Число ступенів рухомості механізму визначаємо за
формулою Чебишева
W = 3n – 2p 5 – p 4= 3·5 – 2·7 – 0 =1,
де n=5 – кількість рухомих ланок; p 5=7 – кількість
кінематичних пар 5 класу; p 4=0 – кількість кінематичних пар 4
класу;
Оскільки W=1, то це означає, що механізм має одну
вхідну ланку – кривошип 1. Далі розбиваємо механізм на
структурні групи (рис.1.2). Першу структурну групу у
послідовності від’єднання утворюють ланки 4 і 5, другу ланки
– 2 і 3. Обидві структурні групи відносяться до другого класу
за класифікацією І. І. Артоболевського. Отже, механізм
складається із початкового механізму І-го класу (стояк 0,
вхідна ланка 1) і двох структурних груп другого класу. А тому
цей механізм відноситься до другого класу. Структурна
формула механізму виглядає так:
І(0,1)→ІІ(2,3)→ІІ(4,5).
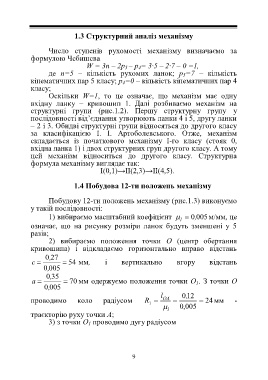
1.4 Побудова 12-ти положень механізму
Побудову 12-ти положень механізму (рис.1.3) виконуємо
у такій послідовності:
1) вибираємо масштабний коефіцієнт 0, 005м/мм, це
l
означає, що на рисунку розміри ланок будуть зменшені у 5
разів;
2) вибираємо положення точки О (центр обертання
кривошипа) і відкладаємо горизонтально вправо відстань
0, 27
c 54 мм, і вертикально вгору відстань
0, 005
0, 35
a 70 мм одержуємо положення точки О 1. З точки О
0, 005
l 0, 12
проводимо коло радіусом R OA 24 мм -
1
0 005
l
траєкторію руху точки А;
3) з точки О 1 проводимо дугу радіусом
9