
Page 47 - 4844
P. 47
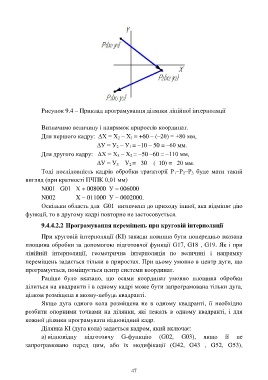
Рисунок 9.4 – Приклад програмування ділянки лінійної інтерполяції
Визначимо величину і напрямок приростів координат.
Для першого кадру: Х = Х – Х = +60 – (–20) = +80 мм,
1
2
У = У – У = –10 – 50 = –60 мм.
1
2
Для другого кадру: Х = Х – Х = –50 –60 = –110 мм,
2
3
У = У – У = –30 – (–10) = –20 мм.
3
2
Тоді послідовність кадрів обробки траєкторії Р –Р –Р буде мати такий
3
1
2
вигляд (при кратності ПЧПК 0,01 мм)
N001 G01 X + 008000 У 006000
N002 X 011000 У 0002000.
Оскільки область для G01 визначена до приходу іншої, яка відміняє дію
функції, то в другому кадрі повторно не застосовується.
9.4.4.2.2 Програмування переміщень при круговій інтерполяції
При круговій інтерполяції (КІ) завжди повинна бути попередньо вказана
площина обробки за допомогою підготовчої функції G17, G18 , G19. Як і при
лінійній інтерполяції, геометрична інтерполяція по величині і напрямку
переміщень задається тільки в приростах. При цьому умовно в центр дуги, що
програмується, поміщується центр системи координат.
Раніше було вказано, що осями координат умовно площина обробки
ділиться на квадранти і в одному кадрі може бути запрограмована тільки дуга,
цілком розміщена в якому-небудь квадранті.
Якщо дуга одного кола розміщена не в одному квадранті, її необхідно
розбити опорними точками на ділянки, які лежать в одному квадранті, і для
кожної ділянки програмувати відповідний кадр.
Ділянка КІ (дуга кола) задається кадром, який включає:
а) відповідну підготовчу G-функцію (G02, G03), якщо її не
запрограмовано перед цим, або їх модифікації (G42, G43 , G52, G53),
47