
Page 9 - 4843
P. 9
дженість їх переміщень і швидкостей, зміни швидкостей і напрямків
руху виконавчих органів, перетворення одного виду руху в інший
(наприклад, обертання в прямолінійний рух, і навпаки), для сумуван-
ня рухів і т.д. Ці ланки інакше називають внутрішніми або функціо-
нальними. Кінематичне з’єднання виконавчих органів складної групи
може бути як механічним – ланцюгом механічних передач (пасових,
зубчастих, черв’ячних), так і немеханічним (наприклад, у вигляді
електричного ланцюга в верстаті з ЧПК). Мінімальна кількість внут-
рішніх кінематичних ланцюгів у складній групі не повинна бути ме-
нше ніж на одиницю числа виконавчих органів. Наприклад, (рис. 1.2,
а) група з двома виконавчими органами І і ІІ, яка забезпечує складний
рух Ф(В В ) повинна мати в своїй структурі як мінімум один внутрі-
1 2
шній ланцюг 1 – 4 – 2 між виконавчими органами.
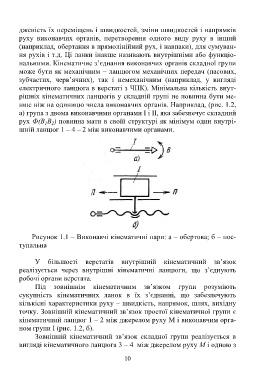
Рисунок 1.1 – Виконавчі кінематичні пари: а – обертова; б – пос-
тупальна
У більшості верстатів внутрішній кінематичний зв’язок
реалізується через внутрішні кінематичні ланцюги, що з’єднують
робочі органи верстата.
Під зовнішнім кінематичним зв’язком групи розуміють
сукупність кінематичних ланок в їх з’єднанні, що забезпечують
кількісні характеристики руху – швидкість, напрямок, шлях, вихідну
точку. Зовнішній кінематичний зв’язок простої кінематичної групи є
кінематичний ланцюг 1 – 2 між джерелом руху М і виконавчим орга-
ном групи І (рис. 1.2, б).
Зовнішній кінематичний зв’язок складної групи реалізується в
вигляді кінематичного ланцюга 3 – 4 між джерелом руху М і одною з
10