
Page 24 - 480
P. 24
U K P
М кр на роторі U 8 8 в К М , де К 10 – коефіцієнт
10 10 кр
U К
3 3
пропорційності, що поступає на вхід індикатора 11.
Використання запропонованого пристрою дозволить
зменшити похибку вимірювання крутного моменту на роторі
бурової установки при вимірюваній частоті обертання.
3 5 7 9
1 6 8 10
2 4 11
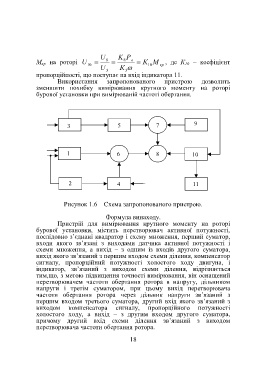
Рисунок 1.6 – Схема запропонованого пристрою.
Формула винаходу.
Пристрій для вимірювання крутного моменту на роторі
бурової установки, містить перетворювач активної потужності,
послідовно з’єднані квадратор і схему множення, перший суматор,
входи якого зв’язані з виходами датчика активної потужності і
схеми множення, а вихід – з одним із входів другого суматора,
вихід якого зв’язаний з першим входом схеми ділення, компенсатор
сигналу, пропорційний потужності холостого ходу двигуна, і
індикатор, зв’язаний з виходом схеми ділення, відрізняється
тим,що, з метою підвищення точності вимірювання, він оснащений
перетворювачем частоти обертання ротора в напругу, дільником
напруги і третім суматором, при цьому вихід перетворювача
частоти обертання ротора через дільник напруги зв’язаний з
першим входом третього суматора, другий вхід якого зв’язаний з
виходом компенсатора сигналу, пропорційного потужності
холостого ходу, а вихід – з другим входом другого суматора,
причому другий вхід схеми ділення зв’язаний з виходом
перетворювача частоти обертання ротора.
18