
Page 113 - 4757
P. 113
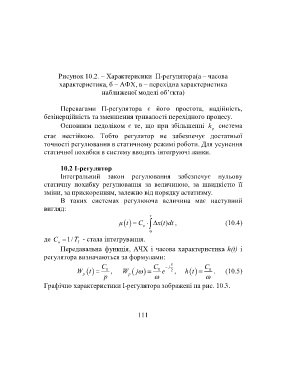
Рисунок 10.2. – Характерисики П-регулятора(а – часова
характеристика, б – АФХ, в – перехідна характеристика
наближеної моделі об’єкта)
Перевагами П-регулятора є його простота, надійність,
безінерційність та зменшення тривалості перехідного процесу.
Основним недоліком є те, що при збільшенні k система
p
стає нестійкою. Тобто регулятор не забезпечує достатньої
точності регулювання в статичному режимі роботи. Для усунення
статичної похибки в систему вводять інтегруючі ланки.
10.2 І-регулятор
Інтегральний закон регулювання забезпечує нульову
статичну похибку регулювання за величиною, за швидкістю її
зміни, за прискоренням, залежно від порядку астатизму.
В таких системах регулююча величина має наступний
вигляд:
o
µ t C x ( )t dt , (10.4)
0
де C 1/T - стала інтегрування.
o I
Передавальна функція, АЧХ і часова характеристика h(t) і
регулятора визначаються за формулами:
C C j C
j
W t 0 , W 0 e 2 , h t 0 . (10.5)
p p
p
Графічно характеристики І-регулятора зображені на рис. 10.3.
111