
Page 85 - 4268
P. 85
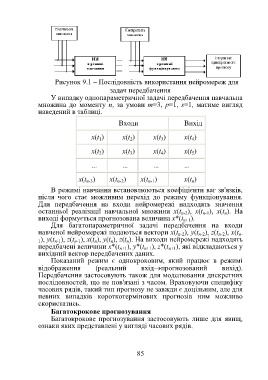
Рисунок 9.1 – Послідовність використання нейромереж для
задач передбачення
У випадку однопараметричної задачі передбачення навчальна
множина до моменту n, за умови m=3, p=1, s=1, матиме вигляд
наведений в таблиці.
Входи Вихід
x(t ) x(t ) x(t ) x(t )
4
1
3
2
x(t ) x(t ) x(t ) x(t )
5
4
3
2
... ... ... ...
x(t ) x(t ) x(t ) x(t )
n-2
n-3
n
n-1
В режимі навчання встановлюються коефіцієнти ваг зв'язків,
після чого стає можливим перехід до режиму функціонування.
Для передбачення на входи нейромережі надходять значення
останньої реалізації навчальної множини x(t ), x(t ), x(t ). На
n-1
n-2
n
виході формується прогнозована величина x*(t n+1 ).
Для багатопараметричної задачі передбачення на входи
навченої нейромережі подаються вектори x(t ), y(t ), z(t ), x(t n-
n-2
n-2
n-2
), y(t ), z(t ), x(t ), y(t ), z(t ). На виходи нейромережі надходять
1 n-1 n-1 n n n
передбачені величини x*(t n+1 ), y*(t n+1 ), z*(t n+1 ), які відкладаються у
вихідний вектор передбачених даних.
Показаний режим є однокроковим, який працює в режимі
відображення (реальний вхідпрогнозований вихід).
Передбачення застосовують також для моделювання дискретних
послідовностей, що не пов'язані з часом. Враховуючи специфіку
часових рядів, такий тип прогнозу не завжди є доцільним, але для
певних випадків короткотермінових прогнозів ним можливо
скористатись.
Багатокрокове прогнозування
Багатокрокове прогнозування застосовують лише для явищ,
ознаки яких представлені у вигляді часових рядів.
85