
Page 79 - 4168
P. 79
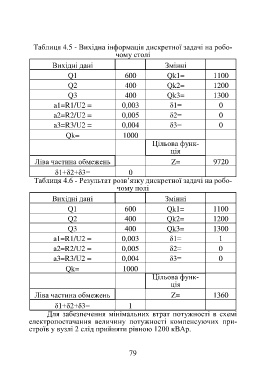
Таблиця 4.5 - Вихідна інформація дискретної задачі на робо-
чому столі
Вихідні дані Змінні
Q1 600 Qk1= 1100
Q2 400 Qk2= 1200
Q3 400 Qk3= 1300
a1=R1/U2 = 0,003 δ1= 0
a2=R2/U2 = 0,005 δ2= 0
a3=R3/U2 = 0,004 δ3= 0
Qk= 1000
Цільова функ-
ція
Ліва частина обмежень Z= 9720
δ1+δ2+δ3= 0
Таблиця 4.6 - Результат розв’язку дискретної задачі на робо-
чому полі
Вихідні дані Змінні
Q1 600 Qk1= 1100
Q2 400 Qk2= 1200
Q3 400 Qk3= 1300
a1=R1/U2 = 0,003 δ1= 1
a2=R2/U2 = 0,005 δ2= 0
a3=R3/U2 = 0,004 δ3= 0
Qk= 1000
Цільова функ-
ція
Ліва частина обмежень Z= 1360
δ1+δ2+δ3= 1
Для забезпечення мінімальних втрат потужності в схемі
електропостачання величину потужності компенсуючих при-
строїв у вузлі 2 слід прийняти рівною 1200 кВАр.
79