
Page 119 - 399_
P. 119
Розділ 5. Первинні перетворювачі положення та переміщення 117
Цифровий еквівалент φ буде рівний куту повороту ротора θ в
результаті одного циклу вимірювання. Регістр виходу дозволяє
передавати до інших пристроїв результати вимірювання кута повороту,
перериваючи процес відслідковування кута.
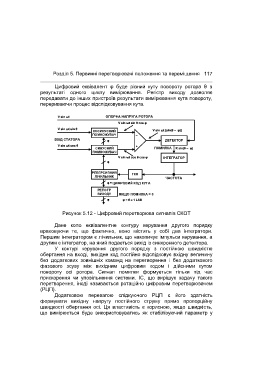
ОПОРНА НАПРУГА РОТОРА
КОСИНУСНИЙ
ПОМНОЖУВАЧ
ВХІД СТАТОРА ДЕТЕКТОР
СИНУСНИЙ ПОМИЛКА
ПОМНОЖУВАЧ
ІНТЕГРАТОР
РЕВЕРСИВНИЙ ГКН
ЛІЧИЛЬНИК
ЧАСТОТА
ЦИФРОВИЙ КОД КУТА
РЕГІСТР
ВИХОДУ ЯКЩО ПОМИЛКА = 0
Рисунок 5.12 - Цифровий перетворюва сигналів СКОТ
Дане коло еквівалентне контуру керування другого порядку
враховуючи те, що фактично, воно містить у собі два інтегратори.
Першим інтегратором є лічильник, що накопичує імпульси керування, а
другим є інтегратор, на який подається вихід із синхронного детектора.
У контурі керування другого порядку з постійною швидкістю
обертання на вході, вихідне код постійно відслідковує вхідну величину
без додаткових зовнішніх команд на перетворення і без додаткового
фазового зсуву між вихідним цифровим кодом і дійсними кутом
повороту осі ротора. Сигнал помилки формується тільки під час
прискорення чи уповільнення системи. ІС, що вирішує задачу такого
перетворення, іноді називається ротаційно цифровим перетворювачем
(РЦП).
Додатковою перевагою слідкуючого РЦП є його здатність
формувати вихідну напругу постійного струму прямо пропорційну
швидкості обертання осі. Ця властивість є корисною, якщо швидкість,
що вимірюється буде використовуватись як стабілізуючий параметр у