
Page 94 - 2577
P. 94
часовий параметр, V -швидкість перетворення даних, M - об’єм використовуваної пам’яті,
S - системні ресурси; X (t )-поточне значення параметру, M -математичне сподівання, D -
x x
дисперсія, - середньоквадратичне відхилення, R - автокореляційна функція, R -
x xx xy
взаємокореляційна функція, M - матриця нормованих коефіцієнтів взаємокореляції, (wS ) -
ij
спектральні моделі, K -матриця імовірностей переходу в різні стани, ЛСІМ - логіко-
ij
статистична інформаційна модель, I - ентропійна модель; K - коефіцієнт ефективності
x ed
руху даних, P - собівартість виконання операції в активному вузлі матричної моделі; M -
V
1
матрична модель руху даних, ТМРД (S , S ,C ,C ,G ) - тривимірна матрична модель руху даних
0 i o i
( S – максимальне число записів, S – реальне число записів, C – швидкість створення та
0
0
i
передавання даних, C – проектна швидкість створення та передавання даних, G –
i
завантаженість), ДММРД ( , , , d , d ) -двовимірна матрична модель руху даних ( -
0 1 2 0 i 0
ресурси зчитування даних; -ступінь використання ресурсів зчитування даних; -ступінь
1 2
використання ресурсів записів; d , d - відповідно ресурси та ступінь використання
0 i
швидкості передавання даних в каналі зв'язку); M - похідні моделі; ЕРД -сигнальна епюра
n
руху даних (ЕРД), ЕРД (t )- диференціальна ЕРД, ЕРД( T) dT -інтегральна ЕРД,
j
n
ЕРД( T) dT -сумарна інтегральна ЕРД; G КС -глобальна характеристика ефективності
i 1
комп’ютерної системи.
6. 1 Методи організації руху даних в комп’ютерних системах на основі матричних
моделей
Матриці інциденцій є теоретичною та методологічною основою для побудови
матричних моделей руху даних (ММРД). При цьому ММРД об’єднують характеристики
матриці інциденцій та графових дерев і більш конкретизовані, оскільки доповнюються
символами атрибутів, які відображають поняття джерела інформації, проміжного пункту
цифрової обробки даних та приймача інформації.
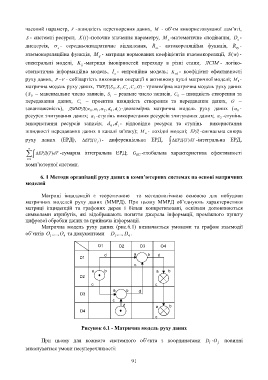
Матрична модель руху даних (рис.6.1) визначається умовами та графом взаємодії
об’єктів O ,...,O та документами D ,..., D .
1 4 1 4
O1 O2 O3 O4
d a b d
D1
c
a b a b
D2
c c
a b d
D3
c
d a b
D4
c
Рисунок 6.1 - Матрична модель руху даних
При цьому для кожного системного об’єкта з координатами D O повинні
i
j
виконуватися умови несуперечливості:
91