
Page 12 - 256_
P. 12
1 ОCНОВНІ ПОНЯТТЯ І ВИЗНАЧЕННЯ
Основною задачею будь-якої системи автоматичного
керування є регулювання одного або декількох параметрів
технологічного процесу.
Під керуванням (регулюванням) технологічного процесу
розуміють сукупність таких операцій, які необхідні для
здійснення пуску, зупинки або підтримування технологічного
параметру на заданому рівні або зміна його по певному
закону. Установку, агрегат, машину в яких протікає
технологічний процес, називається об’єктом керування (ОК).
Керування може бути як ручним так і автоматичним. В 1-
му випадку операцію керування здійснює людина, а в 2-му –
автоматичний регулятор (АР), керуючий пристрій (КП).
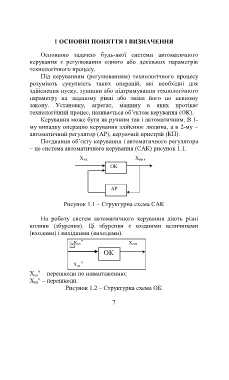
Поєднання об’єкту керування і автоматичного регулятора
– це система автоматичного керування (САК) рисунок 1.1.
Х вх Х вих
ОК
АР
Рисунок 1.1 – Структурна схема САК
На роботу систем автоматичного керування діють різні
впливи (збурення). Ці збурення є вхідними величинами
(входами) і вихідними (виходами).
н
Х вх Х вих
ОК
п
Х вх
н
Х вх – перешкоди по навантаженню;
п
Х вх – перешкоди.
Рисунок 1.2 – Структурна схема ОК
7