
Page 42 - Г
P. 42
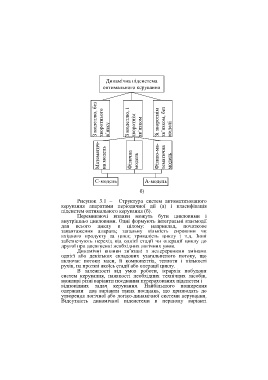
Динамічна підсистема
оптимального керування
З моделлю, без зворотнього З моделлю, і Зі зворотнім зв’язком, без
зворотнім зв’язком моделі
в’язку
Математич- на модель Фізико-ма- тематична
Фізична модель модель
С-модель А-модель
б)
Рисунок 3.1 – Структура систем автоматизованого
керування апаратами періодичної дії (а) і класифікація
підсистем оптимального керування (б).
Перемикаючі впливи можуть бути цикловими і
внутрішньо цикловими. Одні формують інтегральні взаємодії
для всього циклу в цілому: наприклад, початкове
завантаження апарата; загальну кількість сировини чи
вхідного продукту за цикл; тривалість циклу і т.д. Інші
забезпечують перехід від однієї стадії чи операції циклу до
другої при досягненні необхідних логічних умов.
Динамічні впливи зв’язані з неперервними змінами
однієї або декількох складових узагальненого потоку, що
включає потоки маси, її компонентів, теплоти і кількості
рухів, на протязі якоїсь стадії або операції циклу.
В залежності від умов роботи, ієрархія побудови
систем керування, наявності необхідних технічних засобів,
можливі різні варіанти поєднання перерахованих підсистем і
відповідних задач керування. Найбільшого поширення
одержали два варіанти таких поєднань, що призводять до
утворення логічної або логіко-динамічної системи керування.
Відсутність динамічної підсистеми в першому варіанті