
Page 20 - Г
P. 20
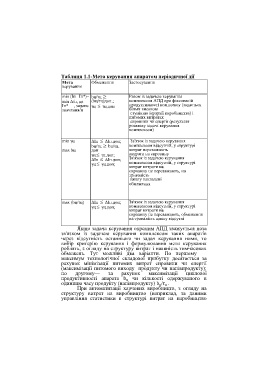
Таблиця 1.1-Мета керування апаратом періодичної дії
Мета Обмеження Застосування
керування
min (Іп –Іп*)= bц/τц Разом із задачею керування
min Δ/п, де (bц/τц)доп.; комплексом АПД при фіксованій
Іп*— , задане τц τц.доп продуктивності комплексу (задається
значення/п більш високою
ступінню ієрархії виробництва) і
питомих витратах
сировини чи енергії (результат
розвязку задачі керування
комплексом)
min γц ΔІп ΔІп.доп; Зв'язок із задачею керування
bц/τц bц/τц. комплексом відсутній, у структурі
max bц доп витрат переважають
τц τц.доп; витрати на сировину
ΔІп ΔІп.доп; Зв'язок із задачею керування
γц γц.доп; комплексом відсутній, у структурі
витрат витрати на
сировину не переважають, на
тривалість
циклу накладені
обмеження
max (bц/τц) ΔІп ΔІп.доп; Зв'язок із задачею керування
γц γц.доп; комплексом відсутній, у структурі
витрат витрати на
сировину не переважають, обмеження
на тривалість циклу відсутні
Якщо задача керування окремим АПД зважується поза
зв'язком із задачею керування комплексом таких апаратів
через відсутність останнього чи задач керування ними, то
вибір критерію керування і формулювання мети керування
роблять, з огляду на структуру витрат і наявність тимчасових
обмежень. Тут можливі два варіанти. По першому —
максимум технологічної складової прибутку досягається за
рахунок мінімізації питомих витрат сировини чи енергії
(максимізації питомого виходу продукту чи напівпродукту);
по другому— за рахунок максимізації циклової
продуктивності апарата b ц чи кількості одержуваного в
одиницю часу продукту (напівпродукту) b ц/τ ц .
При автоматизації харчових виробництв, з огляду на
структуру витрат на виробництво (наприклад, за даними
управління статистики в структурі витрат на виробництво