
Page 72 - Векерик В
P. 72
69
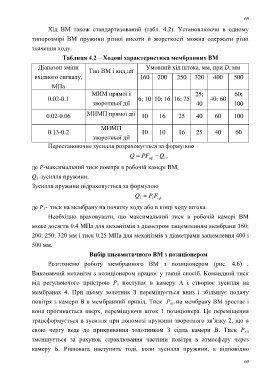
Хід ВМ також стандартизований (табл. 4.2). Установлюючи в одному
типорозмірі ВМ пружини різної висоти й жорсткості можна одержати різні
значення ходу.
Таблиця 4.2 – Ходові характеристика мембранних ВМ
Діапазон зміни Умовний хід штока, мм, при D, мм
Тип ВМ і вид дії
вхідного сигналу, 160 200 250 320 400 500
МПа
МИМ прямої і 25; 60;
0.02-0.1 6; 10 10; 16 16; 25 40; 60
зворотньої дії 40 100
0.02-0.06 МИМП прямої дії 10 16 25 40 60 100
МИМП
0.13-0.2 10 10 16 25 40 60
зворотньої дії
Перестановочне зусилля розраховується за формулою
дії
ДО Q PF еф Q ,
1
де Р-максимальний тиск повітря в робочій камері ВМ,
Q -зусилля пружини.
1
Зусилля пружини підраховується за формулою
Q 1 P 1 F
еф
де P - тиск на мембрану на початку ходу або в кінці ходу штока.
1
Необхідно враховувати, що максимальний тиск в робочій камері ВМ
може досягти 0.4 МПа для механізмів з діаметром защемленням мембрани 160;
200; 250; 320 мм і тиск 0.25 МПа для механізмів з діаметрами защемлення 400 і
500 мм.
Вибір пневматичного ВМ з позиціонером
Розглянемо роботу мембранного ВМ з позиціонером (рис. 4.6) .
Виконавчий механізм з позиціонером працює у такий спосіб. Командний тиск
від регулюючого пристрою Р поступає в камеру А і створює зусилля на
К
мембранах 4. При цьому золотник З переміщується вниз і збільшує подачу
повітря з камери В в мембранний привід. Тиск Р на мембрану ВМ зростає і
КП
вона прогинається вверх, переміщуючи шток 1 позиціонера. Це переміщення
трансформується в зусилля при допомозі пружини зворотного зв’язку 2, що в
свою чергу веде до прикривання золотником З сідла камери В. Тиск P
КП
зменшується за рахунок стравлювання частини повітря в атмосферу через
камеру Б. Рівновага наступить тоді, коли зусилля пружини, а відповідно
69