
Page 69 - Векерик В
P. 69
66
Промисловістю (у межах СНД) випускаються широка номенклатура
мембранних пружинних ВМ типу МИМ і МИМП.МИМП відрізняються від
МИМ жорсткішою пружиною, а МИМК - наявністю важеля замість вихідної
ланки.
4.1.2 Вибір виконавчих механізмів
В АСК виконавчі механізми використовуються як приводи регулюючих
органів (клапанів і заслінок). Виконавчий пристрій змінює або підтримує на
заданому рівні технологічний параметр зміною кількості продукту, що протікає
через них, у відповідності до командного сигналу, шляхом переміщення
дросельного елемента. Таким чином, ВМ має розвинути певне перестановив
зусилля або момент. Ці параметри мають бути тим більшим, чим більша
величина неврівноважених сил і сил тертя РО і чим вищі вимоги до точності
позиційної установки дросельного елемента, тобто точності ходової
характеристики системи ВМ - РО.
Неврівноваженість РО має значний діапазон, тому, очевидно, ВМ при
однаковій необхідній точності ходової ПОЗИЦІЙНОЇ установки їх дросельних
елементів будуть мати різні силові характеристики.
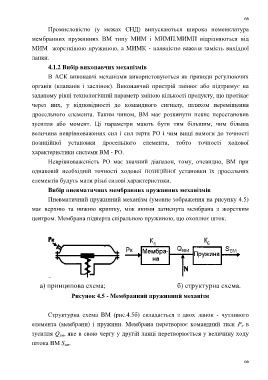
Вибір пневматичних мембранних пружинних механізмів
Пневматичний пружинний механізм (умовне зображення на рисунку 4.5)
має верхню та нижню кришку, між якими затиснута мембрана з жорстким
центром. Мембрана підперта спіральною пружиною, що охоплює шток.
а) принципова схема; б) структурна схема.
Рисунок 4.5 - Мембранний пружинний механізм
Структурна схема ВМ (рис.4.5б) складається з двох ланок - чутливого
елемента (мембрани) і пружини. Мембрана перетворює командний тиск Р в
К
зусилля Q , яке в свою чергу у другій ланці перетворюється у величину ходу
ВМ
штока ВМ S .
BM
66