
Page 100 - 6208
P. 100
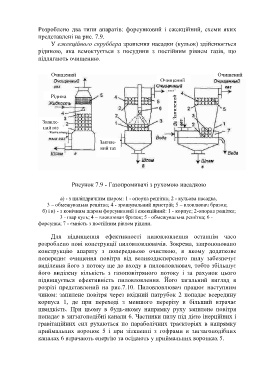
Розроблено два типи апаратів: форсунковий і ежекційний, схеми яких
представлені на рис. 7.9.
У ежекційного скруббера зрошення насадки (кульок) здійснюється
рідиною, яка всмоктується з посудини з постійним рівнем газів, що
підлягають очищенню.
Очищений Очищений
Очищений
Запилений
Рідина
Запиле-
ний газ
Запиле-
ний газ
Рисунок 7.9 - Газопромивачі з рухомою насадкою
а) - з циліндричним шаром: 1 - опорна решітка; 2 - кульова насадка,
3 – обмежувальна решітка; 4 - зрошувальний пристрій; 5 – вловлювач бризок;
б) і в) - з конічним шаром форсунковий і ежекційний: 1 - корпус; 2-опорна решітка;
3 - шар куль; 4 – вловлювач бризок; 5 - обмежувальна решітка; 6 -
форсунка; 7 - ємність з постійним рівнем рідини.
Для підвищення ефективності пиловловлення останнім часо
розроблено нові конструкції пиловловлювачів. Зокрема, запропоновано
конструкцію апарату з попередньою очисткою, в якому додаткове
попереднє очищення повітря від великодисперсного пилу забезпечує
виділення його з потоку ще до входу в пиловловлювач, тобто збільшує
його виділену кількість з газоповітряного потоку і за рахунок цього
підвищується ефективність пиловловлення. Його загальний вигляд в
розрізі представлений на рис.7.10. Пиловловлювач працює наступним
чином: запилене повітря через вхідний патрубок 2 попадає всередину
корпуса 1, де при переході з меншого перерізу в більший втрачає
швидкість. При цьому в будь-якому напрямку руху запилене повітря
попадає в зигзагоподібні канали 6. Частинки пилу під дією інерційних і
гравітаційних сил рухаються по параболічних траєкторіях в напрямку
приймальних воронок 5 і при зіткненні з гофрами в зигзагоподібних
каналах 6 втрачають енергію та осідають у приймальних воронках 5.