
Page 205 - 6111
P. 205
масиву, де кожен трансп’ютер пов’язаний з чотирма найближчими
сусідами. Можливе об’єднання трансп’ютерів в групи з подальшим
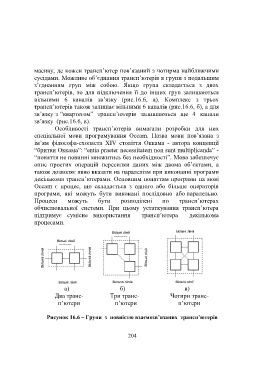
з’єднанням груп між собою. Якщо група складається з двох
трансп’ютерів, то для підключення її до інших груп залишаються
вільними 6 каналів зв’язку (рис.16.6, а). Комплекс з трьох
трансп’ютерів також залишає вільними 6 каналів (рис.16.6, б), а для
зв’язку з “квартетом” трансп’ютерів залишаються ще 4 канали
зв’язку (рис.16.6, в).
Особливості трансп’ютерів вимагали розробки для них
спеціальної мови програмування Occam. Назва мови пов’язана з
ім’ям філософа-схоласта XIV століття Оккама - автора концепції
“бритви Оккама”: “entia praeter necessitatem non sunt multiplicanda” -
“поняття не повинні множитись без необхідності”. Мова забезпечує
опис простих операцій пересилки даних між двома об’єктами, а
також дозволяє явно вказати на паралелізм при виконанні програми
декількома трансп’ютерами. Основним поняттям програми на мові
Occam є процес, що складається з одного або більше операторів
програми, які можуть бути виконані послідовно або паралельно.
Процеси можуть бути розподілені по трансп’ютерах
обчислювальної системи. При цьому устаткування трансп’ютера
підтримує сумісне використання трансп’ютера декількома
процесами.
а) б) в)
Два транс- Три транс- Чотири транс-
п’ютери п’ютери п’ютери
Рисунок 16.6 – Групи з повністю взаємозв’язаних трансп’ютерів
204