
Page 149 - 480
P. 149
(t i)
┴
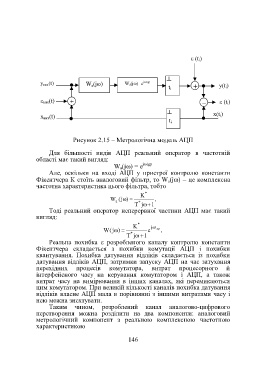
y вих (t) W a(jω) W a(jω)=e jtдp
t i + y(t i)
вих(t) + – (t i)
┴ x(t i)
x вих(t)
t i
Рисунок 2.15 – Метрологічна модель АЦП
Для більшості видів АЦП реальний оператор в частотній
області має такий вигляд:
W a(j) = e jtgp
Але, оскільки на вході АЦП у пристрої контролю константи
Фікентчера К стоїть аналоговий фільтр, то W a(j) – це комплексна
частотна характеристика цього фільтра, тобто
K *
W a j ( ) ,
T * j 1
Тоді реальний оператор неперервної частини АЦП має такий
вигляд:
K * j t
W j ( ) * e дp ,
T j 1
Реальна похибка розробленого каналу контролю константи
Фікентчера складається з похибки комутації АЦП і похибки
квантування. Похибка датування відліків складається із похибки
датування відліків АЦП, затримки запуску АЦП на час затухання
перехідних процесів комутатора, витрат процесорного й
інтерфейсного часу на керування комутатором і АЦП, а також
витрат часу на вимірювання в інших каналах, які перемикаються
цим комутатором. При великій кількості каналів похибка датування
відліків власне АЦП мала в порівнянні з іншими витратами часу і
нею можна знехтувати.
Таким чином, розроблений канал аналогово-цифрового
перетворення можна розділити на два компоненти: аналоговий
метрологічний компонент з реальною комплексною частотною
характеристикою
146