
Page 99 - 4679
P. 99
Для забезпечення безпомилковості і максимальної зручності передачі інформації
комунікаційні операції регулюються набором правил і угод, званих мережевим
протоколом. Мережевий протокол визначає типи роз'ємів, кабелів, сигнали, формати
даних і способи перевірки помилок, а також алгоритми для мережевих інтерфейсів і
вузлів, припускаючи стандартними в межах мережі принципи підготовки повідомлень і
їх передачі.
На сьогодні спектр протоколів для обох цих класів промислових мереж (що
управляють і польові) досить широкий.
Сьогодні на ринку промислових мереж є присутній: CAN, FIP, Profibus, MPI,
ControlNet, DH+, Modbus, Modbus plus, Genius, DirectNet, DeviceNet, Interbus, SDS, ASI,
HART, FF і ще декілька десятків протоколів. Кожен з цих протоколів має свої
особливості і сфери застосування.
Протокол MODBUS можна назвати найбільш поширеним у світі. Для роботи зі
своїми пристроями його використовують десятки фірм. Протокол притягає простотою
логіки і незалежністю від типу інтерфейсу (RS-232C, RS-422, RS-485 або ж струмова
петля 20 мА).
Протокол працює за принципом Master/Slave (веде-ведений). Конфігурація на
основі цього протоколу припускає наявність одного Master-вузла і до 247 Slave-вузлів.
Тільки Master ініціює цикли обміну даними. Існує два типи запитів:
запит/відповідь (адресується тільки один з Slave-вузлів);
широкомовна передача (Master через виставляння адреси 0 звертається до
усіх інших вузлів мережі одночасно).
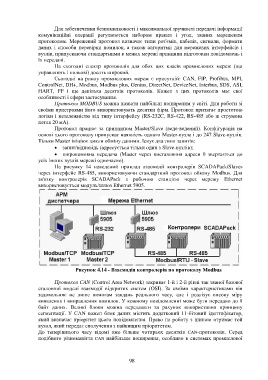
На рисунку 14 наведений приклад взаємодії контролерів SCADAPack/Slaves
через інтерфейс RS-485, використовуючи стандартний протокол обміну Modbus. Для
зв'язку контролерів SCADAPack з робочою станцією через мережу Ethernet
використовується модуль/шлюз Ethernet 5905.
Рисунок 4.14 - Взаємодія контролерів по протоколу Modbus
Протокол CAN (Control Area Network) закриває 1-й і 2-й рівні так званої базової
еталонної моделі взаємодії відкритих систем (OSI). За своїми характеристиками він
задовольняє не лише вимогам завдань реального часу, але і реалізує високу міру
виявлення і виправлення помилок. У кожному повідомленні може бути передано до 8
байт даних. Великі блоки можна передавати за рахунок використання принципу
сегментації. У CAN кожен блок даних містить додатковий 11-бітовий ідентифікатор,
який визначає пріоритет цього повідомлення. Право на роботу з шиною отримає той
вузол, який передає сполучення з найвищим пріоритетом.
До теперішнього часу відомі вже більше чотирьох десятків CAN-протоколів. Серед
подібного різноманіття CAN найбільше поширення, особливо в системах промислової
98