
Page 93 - 4679
P. 93
Комунікація між контролером і підсистемою вводу/виводу. Така комунікація
можлива завдяки інтерфейсному модулю, що підтримує один з комунікаційних
протоколів, що ухвалили, : Profibus DP, Modbus RTU, Modbus +, CAN, DeviceNet, Hart і
т. д. Взагалі, налічується більше 50 стандартів промислових шин.
Комунікаційна шина працює за принципом ведучий-ведений (master-slave).
Тільки ведучий пристрій на шині може ініціювати обмін даними. Ведені пристрої
пасивно прослуховують усі дані, що йдуть по шині, і тільки у разі отримання запиту від
провідного пристрою відправляють назад відповідь. Кожен пристрій на шині має свою
унікальну мережеву адресу, необхідну для однозначної ідентифікації. Вузли
вводу/виводу, як правило, є веденими пристроями, тоді як контролери - ведучими.
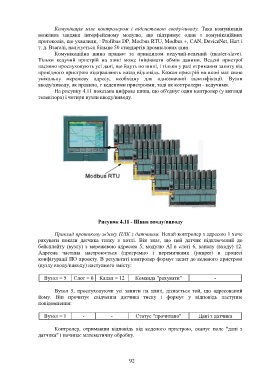
На рисунку 4.11 показана цифрова шина, що об'єднує один контролер (у вигляді
телевізора) і чотири вузли вводу/виводу.
Рисунок 4.11 - Шина вводу/виводу
Приклад протоколу зв'язку ПЛК з датчиком. Нехай контролер з адресою 1 хоче
рахувати покази датчика тиску в котлі. Він знає, що цей датчик підключений до
бейсплейту (вузлу) з мережевою адресою 5, модулю АI в слоті 6, каналу (входу) 12.
Адресна частина настроюється (програмно і перемичками (jumper) в процесі
конфігурації ПО проекту. В результаті контролер формує запит до веденого пристрою
(вузлу вводу/виводу) наступного змісту:
Вузол = 5 Слот = 6 Канал = 12 Команда "рахувати" -
Вузол 5, прослуховуючи усі запити на шині, дізнається той, що адресований
йому. Він прочитує свідчення датчика тиску і формує у відповідь наступне
повідомлення:
Вузол = 1 - - Статус "прочитано" Дані з датчика
Контролер, отримавши відповідь від веденого пристрою, сканує поле "дані з
датчика" і починає математичну обробку.
92