
Page 249 - 4655
P. 249
Тому поверхневі динамограми корисно порівнювати з плун-
жерною свердловинною динамограмою.
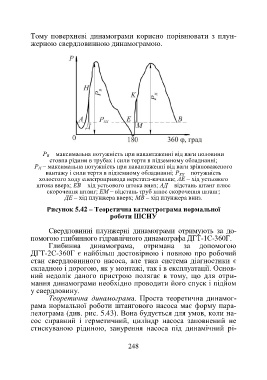
Р В – максимальна потужність при навантаженні від ваги половини
стовпа рідини в трубах і сили тертя в підземному обладнанні;
Р Н – максимальна потужність при навантаженні від ваги зрівноваженого
вантажу і сили тертя в підземному обладнанні; Р ХХ – потужність
холостого ходу електропривода верстата-качалки; АЕ – хід устьового
штока вверх; ЕВ – хід устьового штока вниз; АД – відстань штанг плюс
скорочення штанг; ЕМ – відстань труб плюс скорочення штанг;
ДЕ – хід плунжера вверх; МВ – хід плунжера вниз.
Рисунок 5.42 – Теоретична ватметрограма нормальної
роботи ШСНУ
Свердловинні плунжерні динамограми отримують за до-
помогою глибинного гідравлічного динамографа ДГТ-1С-360Г.
Глибинна динамограма, отримана за допомогою
ДГТ-2С-360Г є найбільш достовірною і повною про робочий
стан свердловинного насоса, але така система діагностики є
складною і дорогою, як у монтажі, так і в експлуатації. Основ-
ний недолік даного пристрою полягає в тому, що для отри-
мання динамограми необхідно проводити його спуск і підйом
у свердловину.
Теоретична динамограма. Проста теоретична динамог-
рама нормальної роботи штангового насоса має форму пара-
лелограма (див. рис. 5.43). Вона будується для умов, коли на-
сос справний і герметичний, циліндр насоса заповнений не
стискуваною рідиною, занурення насоса під динамічний рі-
248