
Page 85 - 4617
P. 85
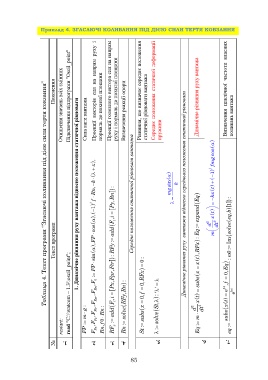
Приклад 4. ЗГАСАЮЧІ КОЛИВАННЯ ПІД ДІЄЮ СИЛИ ТЕРТЯ КОВЗАННЯ
і
руху напрям власних
Очищення значень всіх змінних Сила ваги вантажа векторів нормаль до похилої площини руху і нормаль до похилої площини Визначення реакції опори статичної рівноваги вантажа Визначення коливань вантажа
Пояснення Підключення підпрограми "Oscil_point" на сил Проекції головного вектора сил на напрям Рівняння, що визначає середнє положення Середнє положення статичної деформації Динамічне рівняння руху вантажа частоти циклічної
Таблиця 4. Текст програми “Згасаючі коливання під дією сили тертя ковзання”
1. Динамічне рівняння руху вантажа відносно положення статичної рівноваги
пружини
Проекції
cos
, fmg
x
j 1
k sin k
, :
Rn Середнє положення статичної рівноваги вантажа mg Динамічне рівняння руху вантажа відносно середнього положення статичної рівноваги kxt
,Rn :
f Eq
j
1 Py 1
expand ,b
, cos ,i F i : 2 d xt 2 dt eq
Текст програми ,FP add : RFy ,RFx Eq : m solve Im 0 :
read "C:\\watcom – 1.3\\oscil_point";
sin : 0 : xt :
FP ,Ftr 0,Eq
: ,Fpr x
0 : 0,RFx
,F subs ,f
Rn Px ,Rn '' e bt
,F 0,f : e bt
Fpr ,i i RFy , xt t
: ,F : F St 2 2 x
g Ftr Rn add x d dt
m ,F Py solve subs solve subs
restart: : FP ,F F Px ,0 f Rn : RF x : Rn : St : Eq m : eq
№ 1. 2. 3. 4. 5. : 6. 7.
85