
Page 109 - 4495
P. 109
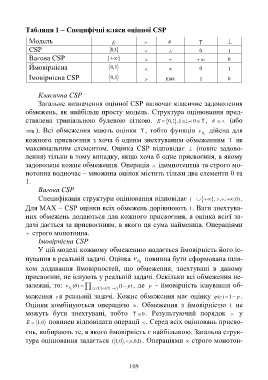
Таблиця 1 – Специфічні класи оцінної CSP
Модель E # T
CSP 0 1 , 0 1
Вагова CSP {+∞} 0
Ймовірнісна 1 , 0 0 1
Імовірнісна CSP 1 , 0 max 1 0
Класична CSP
Загальне визначення оцінної CSP включає класичне задоволення
обмежень, як найбільш просту модель. Структура оцінювання пред-
ставлена тривіальною булевою сіткою. E 0,1 ,1 0 T, # (або
min ). Всі обмеження мають оцінки T , тобто функція дійсна для
E P
кожного присвоєння з хоча б одним знехтуваним обмеженням T як
максимальним елементом. Оцінка CSP відповідає (повне задово-
лення) тільки в тому випадку, якщо хоча б одне присвоєння, в якому
задоволене кожне обмеження. Операція ідемпотентна та строго мо-
нотонна водночас – множина оцінок містить тільки два елементи 0 та
1.
Вагова CSP
Специфікація структури оцінювання відповідає ( , , , ,0).
Для MAX – CSP оцінки всіх обмежень дорівнюють 1. Ваги знехтува-
них обмежень додаються для кожного присвоєння, а оцінка всієї за-
дачі дається за присвоєнням, в якого ця сума найменша. Операціями
строго монотонна.
Імовірнісна CSP
У цій моделі кожному обмеженню надається ймовірність його іс-
нування в реальній задачі. Оцінка повинна бути сформована шля-
P
E
хом додавання ймовірностей, що обмеження, знехтувані в даному
присвоєнні, не існують у реальній задачі. Оскільки всі обмеження не-
)
залежні, то: ( ) (1 p , де p - ймовірність існування об-
E P (c C ) ( | ) c
меження cв реальній задачі. Кожне обмеження має оцінку ( c 1) p .
Оцінки комбінуються операцією . Обмеження з ймовірністю 1 не
можуть бути знехтувані, тобто T 0. Результуючий порядок у
E 0 , 1 повинен відповідати операції . Серед всіх оцінювань присво-
єнь, вибирають те, в якого ймовірність є найбільшою. Загальна струк-
тура оцінювання задається 1( 0 , , ) 1 , 0 , , . Операціями строго монотон-
109