
Page 146 - 4196
P. 146
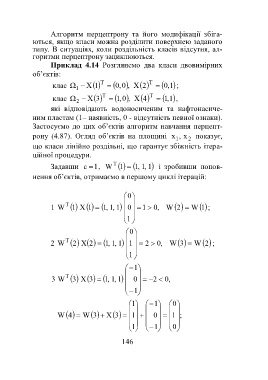
Алгоритм перцептрону та його модифікації збіга-
ються, якщо класи можна розділити поверхнею заданого
типу. В ситуаціях, коли роздільність класів відсутня, ал-
горитми перцептрону зациклюються.
Приклад 4.14 Розглянемо два класи двовимірних
об’єктів:
клас 1 X 1 T 0,0 X, 2 T 1,0 ;
T T
клас 2 X 3 ,0,1 4X 1,1 ,
які відповідають водоносиченим та нафтонасиче-
ним пластам (1– наявність, 0 - відсутність певної ознаки).
Застосуємо до цих об’єктів алгоритм навчання перцепт-
рону (4.87). Огляд об’єктів на площині x 1 , x показує,
2
що класи лінійно роздільні, що гарантує збіжність ітера-
ційної процедури.
Задавши c 1, W T 1,11 1 , і зробивши попов-
нення об’єктів, отримаємо в першому циклі ітерацій:
0
1 W T 1,11X1 1 , 0 1 , 0 W 2 W 1 ;
1
0
2 W T 1,12X2 1 , 1 2 , 0 W 3 W 2 ;
1
1
3 W T 1,13X3 1 , 0 2 , 0
1
1 1 0
4W W X3 3 1 0 1 ;
1 1 0
146